SwarmBox
SwarmBox is an open-source drone swarm framework that aims to decouple high-level swarm logic from low-level flight control and provide a swarm-level integrated analyzer to facilitate debugging and reproducible experimentation.
SwarmBox: A Plug-and-Play Drone Swarm Framework for Streamlined Development and Comprehensive Analysis.
Minki Lee, Seojin Lee, and Seulbae Kim.
In Proceedings of the 34th ACM International Conference on the Foundations of Software Engineering (FSE 2026),
Montreal, Canada, July 2026.
code GitHub docs Paper co_present Slides archive Archive slideshow Videos
Please be advised: SwarmBox is currently in its early stages of development, and there might be some rough edges. We are actively working on improving the framework and will be updating the repository with more features, documentation, and examples in the near future.
Introduction
While drone swarms are emerging as a paradigm-shifting technology, progress in research is often constrained by a fragmented development ecosystem. Every new algorithm requires a bespoke testbed, introducing redundant engineering overhead and making results difficult to reproduce. As a remedy, we present SwarmBox, an open-source framework that provides a shared foundation for swarm robotics.
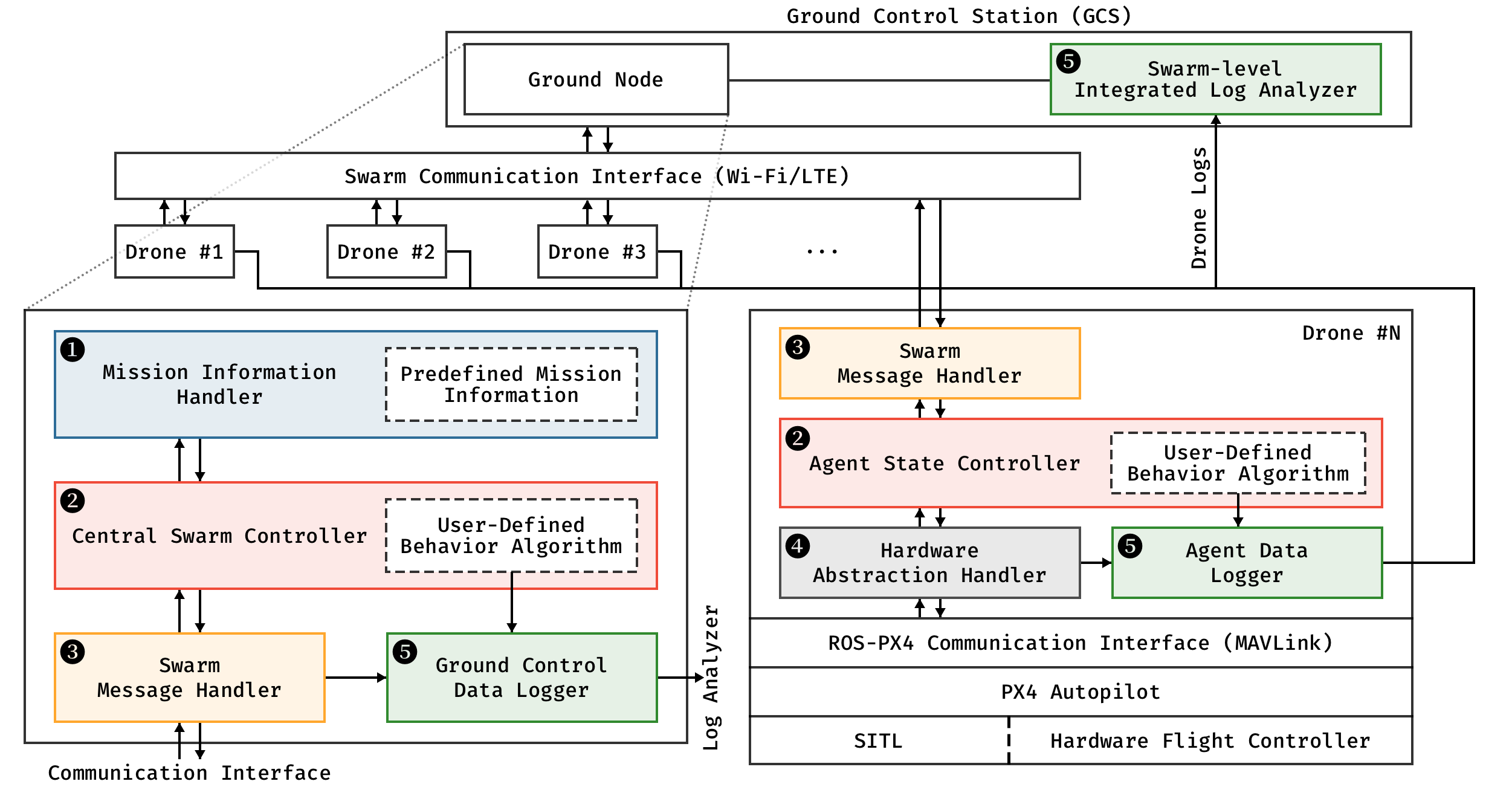
By offering a plug-and-play architecture, a swarm-level integrated analyzer, and configurable experimentation environments, SwarmBox streamlines development and empowers reproducible, community-driven swarm research.
Demo
Watch the full demo video playlist on YouTube
Deep Dive into SwarmBox
For quick setup instructions, please refer to the Getting Started.
For detailed documentation, including architecture overview and usage examples, will be available soon. Please stay tuned for updates!
Cite this work
If you find SwarmBox useful for your research, please consider citing our paper: (pdf, DOI):
@article{lee2026swarmbox,
author = {Lee, Minki and Lee, Seojin and Kim, Seulbae},
title = "{SwarmBox}: A Plug-and-Play Drone Swarm Framework
for Streamlined Development and Comprehensive Analysis",
year = {2026},
issue_date = {July 2026},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {3},
number = {FSE},
url = {https://doi.org/10.1145/3808100},
doi = {10.1145/3808100},
journal = {Proc. ACM Softw. Eng.},
articleno = {FSE093},
numpages = {22},
keywords = {Framework, Swarm, Drone, Cyber-Physical Systems, Distributed CPS}
}
Open Source License
As the goal of this project is to facilitate the research and development of drone swarm systems, SwarmBox is an open-source project licensed under the MIT License. Please feel free to use, modify, and distribute this software in accordance with the terms of the MIT License.
See the LICENSE for more details.
Zenodo Artifact
The fully packaged dataset and integrated execution environment for reproducing the results in our FSE 2026 paper are available on 10.5281/zenodo.19344308.
Upcoming Features
The following features are currently under development or considered for future releases. We will update the repository with these features as they become available.
- In-Progress
- Support for PX4 v1.17
- Creating guide documentation for SwarmBox
- Planned
- Hardware setup guide and description for real-world drone swarm deployment
- Support for ArduPilot for broader hardware compatibility
- Exploring
- Support for Zenoh middleware for better performance and scalability